- Para peneliti di Universitas Tohoku mengembangkan model simulasi teknologi berdasarkan pergerakan sirip ekor pada ikan.
- Mereka mencari tahu kenapa ikan bergerombol demi menciptakan teknologi penggerak yang hemat energi.
- Hasilnya mereka menemukan fakta dari ikan yang bergerombol.
- Gerakan ikan berhasil menciptakan robot yang efisien dan hemat energi.
Ternyata dunia satwa bisa menginspirasi kehadiran teknologi baru seperti pembuatan robot. Para peneliti di Universitas Tohoku, Jepang, mengembangkan model simulasi teknologi berdasarkan pergerakan sirip ekor pada ikan.
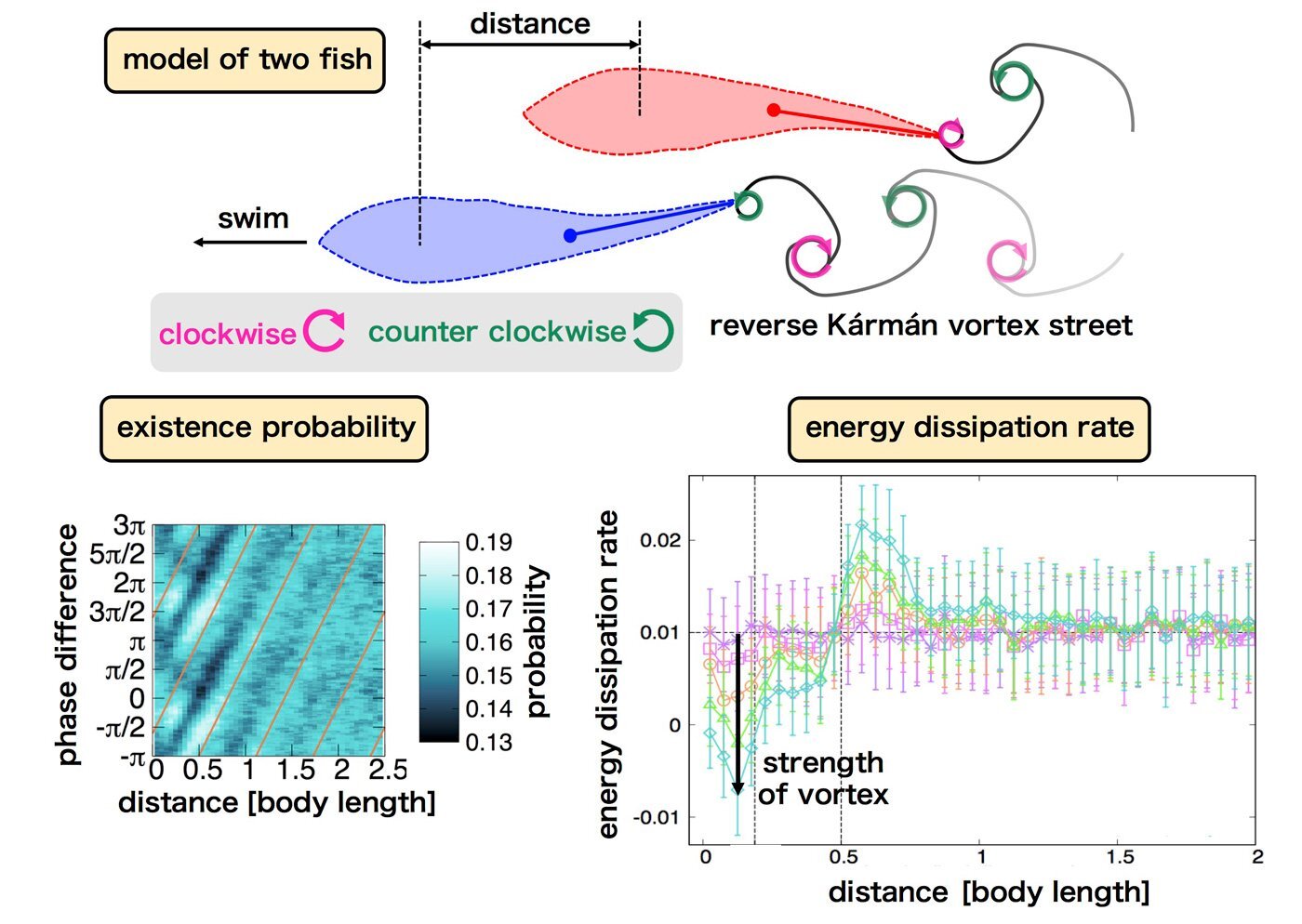
Model ini mengungkapkan mekanisme di balik fenomena yang diamati pada ikan, di mana ikan menggunakan pusaran air yang dibentuk oleh sirip ekornya untuk menghemat energi.
Penelitian dengan judul Physics of Fluids yang diterbitkan pada 2 November 2023 lalu, mengungkap cara ikan berenang. Selama bertahun-tahun, peneliti belum bisa menjawab pertanyaan mendasar, apakah ikan berenang bergerombol sebagai usaha menghemat energi?
Peneliti Utama Susumu Ito dari Universitas Tohoku, menjelaskan bahwa teori lama tentang ikan yang berenang adalah bahwa mereka menggunakan pusaran yang dihasilkan oleh ikan lain untuk menghemat energi. Mereka bekerja bersama-sama untuk memanfaatkan jalan pusaran air yang berbalik arah dengan menyesuaikan sirip ekor mereka.
Dalam bidang fisika fluida, istilah “pusaran” mengacu pada arus berputar di belakang objek yang bergerak melalui fluida. Dalam kasus ini, pusaran menunjukkan arah rotasi yang berlawanan.
Para peneliti mengembangkan model teoritis untuk memahami mekanika ini dengan lebih baik. Tidak hanya memperhitungkan gerakan yang digerakkan oleh otot secara teratur dan efek kekuatan air, tetapi juga vasuriasi alami, seperti faktor fisiologis yang dapat memengaruhi cara ikan bergerak.
baca : Mujair, Ikan yang Bukan Asli Indonesia


Hasilnya, model yang dibuat mampu meniru koordinasi alami gerakan ikan berenang dengan lebih baik. Ito pun senang karena mampu mereproduksi sinkronisasi antara sirip ekor dan sirip punggung dengan menggunakan simulasi numerik.
Penelitian ini menunjukkan bahwa ikan bisa saja kehilangan energi jarak mereka sedikit menjauh. Sebab gerakan sirip di antara ikan bukanlah cara terbaik untuk menghemat energi.
Model ini juga mereproduksi sifat-sifat dasar, seperti hubungan yang ada antara kecepatan ikan berenang dan frekuensi detak ekornya. Model ini juga dapat diterapkan pada ikan yang memiliki gaya renang carangiform atau subcarangiform, seperti makarel kuda, ikan trout, salmon, dan ikan mas.
Carangiform biasa dipakai oleh ikan yang punya tenaga besar dari ekornya yang memudahkan untuk berbelok-belok saat berenang. Sedangkan subcarangiform lebih sering dilakukan oleh ikan yang memiliki tulang belakang. Karena ada tenaga yang berasal dari gerakan tubuh mereka.
“Kami telah mengungkapkan dinamika sinkronisasi di antara spesies biologis. Hal ini dapat diterapkan pada hewan, burung, bakteri, dan eukariot uniseluler. Penemuan ini juga berguna untuk robotika; ini dapat mengarah pada strategi baru yang menghemat energi terhadap drone sekalipun dalam jumlah banyak,” tutur Ito.
baca juga : 7 Karya Mengagumkan yang “Lahir” karena Burung

Dari ikan menjadi robot
Menurut tim peneliti dari Max Planck Institute of Animal Behavior (MPI-AB), Universitas Konstanz, Jerman dan Universitas Peking, China, temuan ini memberikan jawaban yang sudah lama dicurigai namun tidak pernah didukung oleh eksperimen lanjutan.
Hingga akhirnya dengan bantuan robot mirip ikan biomimetik, tim mendemonstrasikan bahwa ikan dapat menerapkan aturan perilaku sederhana untuk memanfaatkan pusaran air yang diciptakan oleh ikan-ikan di depannya. Ini jelas temuan menarik bagi ilmu pengetahuan robotik.
Memodifikasi ketukan ekor ikan dalam kaitannya dengan kelompok menunjukkan bahwa robot mendapatkan keuntungan hidrodinamis. Dan apa yang sebelumnya tidak diketahui diungkapkan oleh robot dan kini mulai terpecahkan dari ikan yang berenang bebas.
“Kawanan ikan adalah sistem sosial yang sangat dinamis. Hasil penelitian kami memberikan penjelasan tentang bagaimana ikan dapat mengambil keuntungan dari pusaran yang dihasilkan tanpa harus menjaga jarak satu sama lain.” kata Iain Couzin, Penulis Senior Studi dan Direktur Max Planck Institute of Animal Behavior
Tim ini menyelidiki ikan robot yang berenang berpasangan dengan ikan hidup yang berenang sendirian. Mereka menjalankan lebih dari 10.000 percobaan dan menguji pengikut di setiap posisi yang memungkinkan dalam kaitannya dengan pemimpin kelompok ikan dan kemudian membandingkan konsumsi energi dengan ikan yang berenang sendirian.
Hasilnya menunjukkan perbedaan yang jelas dalam penggunaan energi untuk robot ketika berenang berpasangan dengan robot yang berenang sendirian. Para peneliti menemukan bahwa alasan perbedaan konsumsi energi ini adalah karena ikan yang berada di depan mempengaruhi hidrodinamika ikan yang berada di belakangnya.
baca juga : Ikan Robot untuk Atasi Persoalan Mikroplastik

Setidaknya, ada dua faktor penentu energi yang digunakan oleh ikan pengikut yaitu jarak dan kesamaan waktu. Rahasianya ternyata terletak pada sinkronisasi. Dengan kata lain, ikan pengikut harus mencocokkan kibas ekornya dengan kibasan ekor ikan pemimpin dengan jeda waktu tertentu berdasarkan posisi spasial.
Pendekatan itu dijuluki “pencocokan fase pusaran” oleh para peneliti. Ketika ikan pengikut berada dekat dengan ikan pemimpin, hal yang paling efektif untuk dilakukan oleh ikan pengikut adalah menyelaraskan detak ekor mereka dengan ikan pemimpin.
Namun, ketika ikan pengikut tertinggal, mereka harus keluar dari sinkronisasi itu dengan lebih banyak jeda dibandingkan dengan ketukan ekor ikan pemimpin. Sehingga akan lebih mengeluarkan energi lebih banyak.
Meskipun demikian, apakah ikan benar-benar memanfaatkan teknik tersebut untuk menghemat daya? Untuk menjawab pertanyaan tersebut, tim mengembangkan model hidrodinamika menggunakan analisis yang dibantu AI terhadap postur tubuh ikan yang berenang bersama.
Kemudian para peneliti menemukan bahwa pendekatan yang sama memang digunakan di alam. Ikan secara naluri akan selalu dekat dengan kelompok, entah untuk mencari makan atau ketika menghindari ancaman predator.
“Kami menemukan aturan sederhana untuk melakukan sinkronisasi dengan kelompok yang memungkinkan pengikut untuk terus mengeksploitasi pusaran yang dihasilkan secara sosial. Namun sebelum eksperimen robotik kami, kami tidak tahu apa yang harus dicari, sehingga aturan ini tersembunyi di depan mata,” pungkas Couzin. (***)
Referensi : thedailyscience.org dan azorobotics.com
